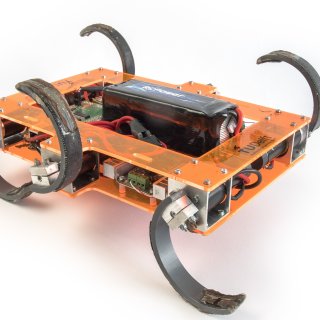
Zebro is an autonomous robot designed on the foundations of RHex. Zebro is designed for education and research to study and develop novel control methodologies for complex robot platforms.
The Zebro platform is used for:
- Experimental validation of novel motion control methodologies
- A benchmark system for Reinforcement Learning algorithms
- Developing functional architectures towards the automatic execution of search and rescue (or similar type) missions
- Software integration and Graphical User Interfaces design towards improving man-machine interfaces
- Leg design and experimentation
- High power - small size - low latency electronics design

DeciZebro