Twitter Pitch
A team of 6 TU Delft Students from two different faculties (3ME & EEMCS) is building a prototype cucumber-picking-robot.
Description
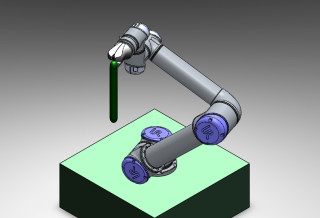
Our cucumber-picking robot has 3 main components: the arm, the gripper and the camera. Those components will be set together on a platform. The gripper consists of a cutting and a gripping element. The component is placed on the arm so that they get the cucumber picked together. Next to arm on the platform the camera can be found. It is a stereo camera. With this the robot can see in 3D.