In this proposal, the automated kite power system developed at TU Delft will provide the electricity for the D2RP&O system and the habitat. The technology is currently being developed and will need to be adjusted to the operation on Mars (atmosphere with lower density and frequent storms, lower gravity). A flexible wing system with small packing volume and minimal weight is proposed. However, the wing surface area needs to be increased to account for the lower atmospheric density. The present development platform is using an 18 kW generator and produces about 7 kW in good wind conditions which powers about 14 Dutch households. The system would be combined with solar PV to buffer periods of low wind, which would establish a microgrid. The system weighs 150-200 kg when the mass of the motor/generator is used as the driving element. The volume is approx. 2 m3. In effect, the wing surface area will have to be slightly increased to achieve the targeted 7 kW in the Mars atmosphere with substantially lower density. The unique advantage that a fully automated kite power system has over a conventional wind turbine is that its operation can be adjusted to the wind conditions on Mars. When the wind blows stronger, the kite can be depowered and flown in maneuvers that reduce the pulling force, to not overload the system. This is the function of the connected control systems of kite and ground station. Because of the low weight and packing volume and thus a high degree of mobility, the use of kite power systems on Mars has already been considered (Alright, 2019).
13 Apr - 2021 (Last edit: 23 May - 2021)
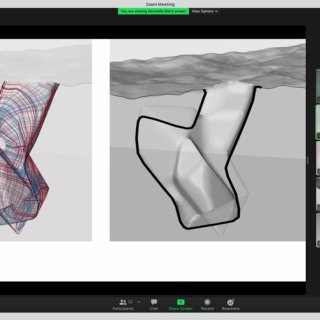
Underground rhizomatic structure with skylights
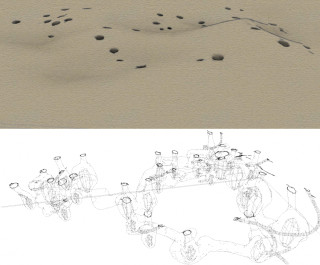
In order for off-Earth top surface structures built from regolith to protect astronauts from radiation, they need to be several meters thick. TUD proposes to excavate into the ground to create subsurface habitats. By excavating not only natural protection from radiation can be achieved but also thermal insulation because the temperature is more stable underground. At the same time through excavation valuable resources can be mined for in situ resource utilization (ISRU). The idea is that a swarm of autonomous mobile robots developed at ESA and/or TUD excavate the ground in a sloped downwards spiral movement.

Zebro rover (http://zebro.space)

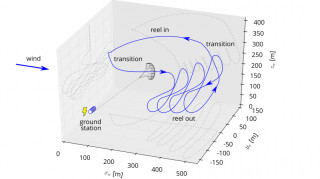
Airborne wind energy system of TU Delft in operation (top) and simulated energy harvesting cycle (bottom)
Researcher
